myPalletizer 260 for Pi
1 Structural parameters
1.1 Robot arm parameters
| index | parameter |
|---|---|
| name | Elephant palletizing robotic arm |
| model | myPalletizer 260 Pi |
| degrees of freedom | 4 |
| Repeatability | ±2 mm |
| load | 250g |
| dead weight | 960g |
| working radius | 260mm |
| Material | Photosensitive resin SLA |
| Charging voltage | 8~12V 5A |
| Motor type | High Precision Magnetic Encoder Servo Servo |
| Movement maximum speed | 120°/s |
| control | Raspberry Pi 4B |
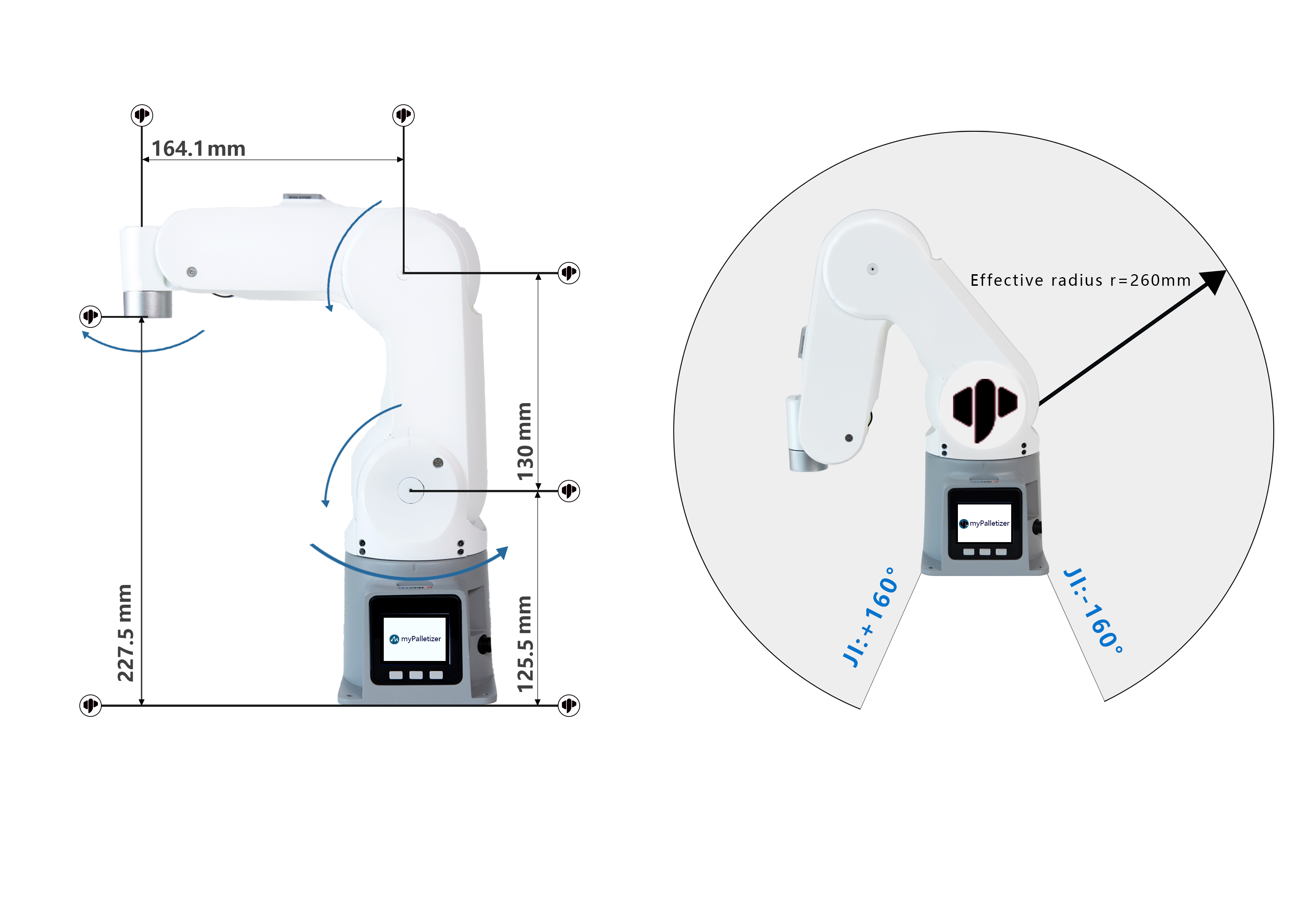
1.2 Workspace
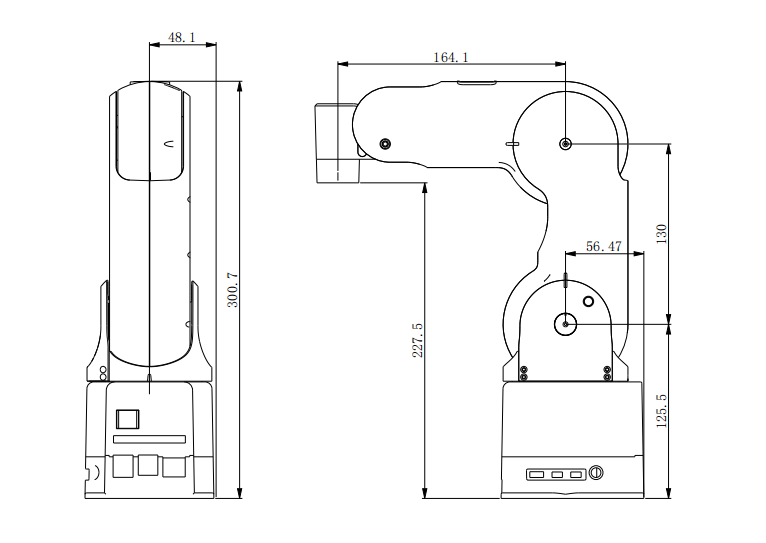
1.3 Specifications and dimensions
1.4 Range of motion of joints
| The essential | Scope |
|---|---|
| J1 | -160 ~ +160 |
| J2 | 0 ~ +90 |
| J3 | 0 ~ +60 |
| J4 | -∞ ~ +∞ |
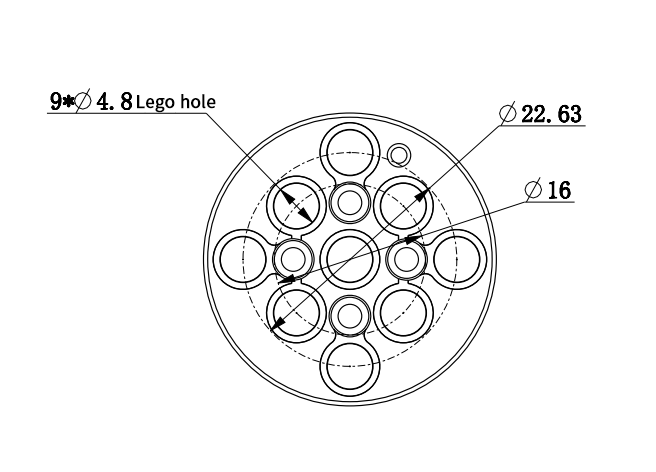
1.5 Hole installation
The Robot Base Mounting Flange Base supports the installation of LEGO components.
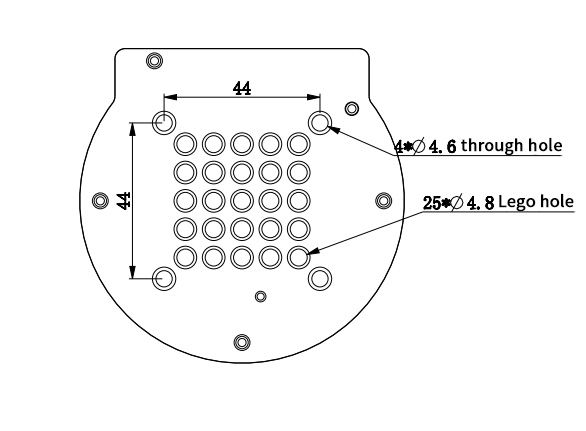
Robot end mounting flange The end of the robot arm supports the installation of LEGO components.
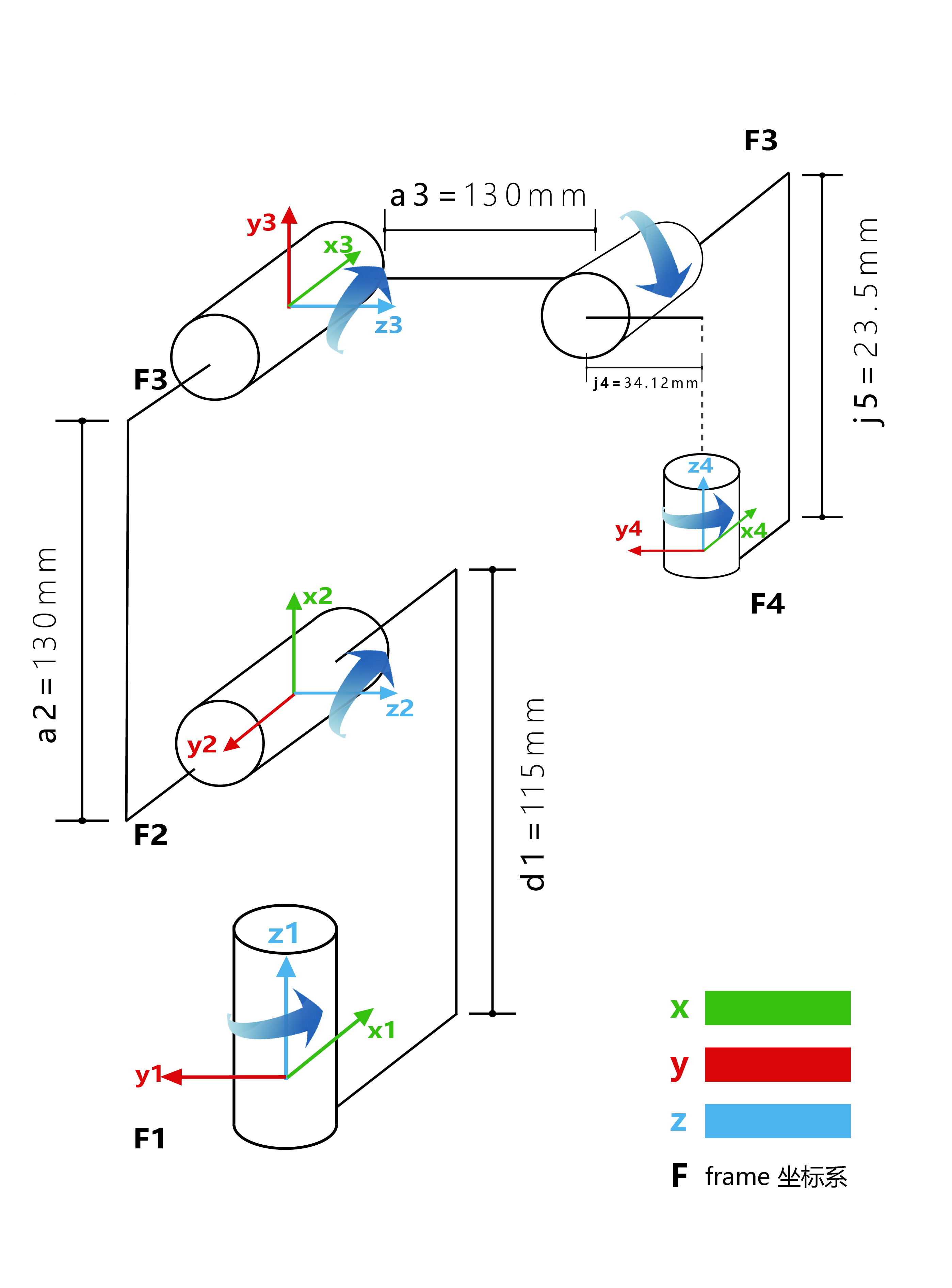
1.6 DH parameter